 |
 |
| 首页 | 机械毕业设计 | 电子电气毕业设计 | 计算机毕业设计 | 土木工程毕业设计 | 视觉传达毕业设计 | 理工论文 | 文科论文 | 毕设资料 | 帮助中心 |
| 今天是: |
|>>> 您现在的位置:首页>>>>文档详细内容 |
| 设计 任务书 文档 开题 答辩 说明书 格式 模板 外文 翻译 范文 资料 作品 文献 课程 实习 指导 调研 下载 网络教育 计算机 网站 网页 小程序 商城 购物 订餐 电影 安卓 Android Html Html5 SSM SSH Python 爬虫 大数据 管理系统 图书 校园网 考试 选题 网络安全 推荐系统 机械 模具 夹具 自动化 数控 车床 汽车 故障 诊断 电机 建模 机械手 去壳机 千斤顶 变速器 减速器 图纸 电气 变电站 电子 Stm32 单片机 物联网 监控 密码锁 Plc 组态 控制 智能 Matlab 土木 建筑 结构 框架 教学楼 住宅楼 造价 施工 办公楼 给水 排水 桥梁 刚构桥 水利 重力坝 水库 采矿 环境 化工 固废 工厂 视觉传达 室内设计 产品设计 电子商务 物流 盈利 案例 分析 评估 报告 营销 报销 会计 | |||||
|
|||||
|
|||||
|
|||||
中文摘要i
Abstractii
1 引言1
1.1 研究背景. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 研究意义. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 论文组织与结构. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 脉冲神经网络4
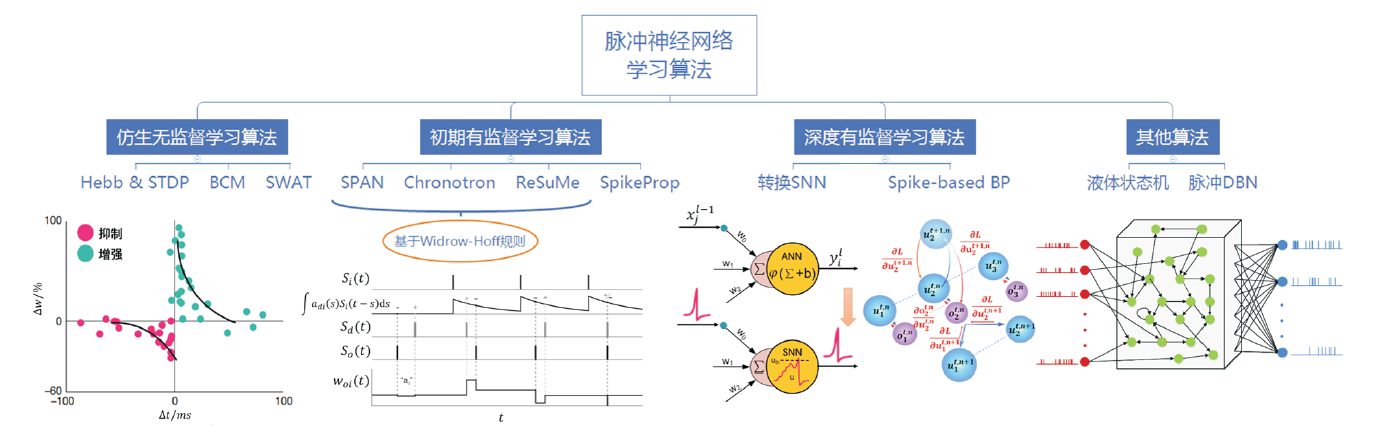
2.1 学习算法. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 ANN 转化的 SNN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 国内外研究进展. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.2 脉冲发放率和模拟激活值数学分析. . . . . . . . . . . . . . . . . . 5
2.3 ANN 操作的脉冲实现. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1 偏置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.2 参数标准化. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.3 BN 层的转化. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.4 脉冲层中的最大池化. . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 ANN 模型结构9
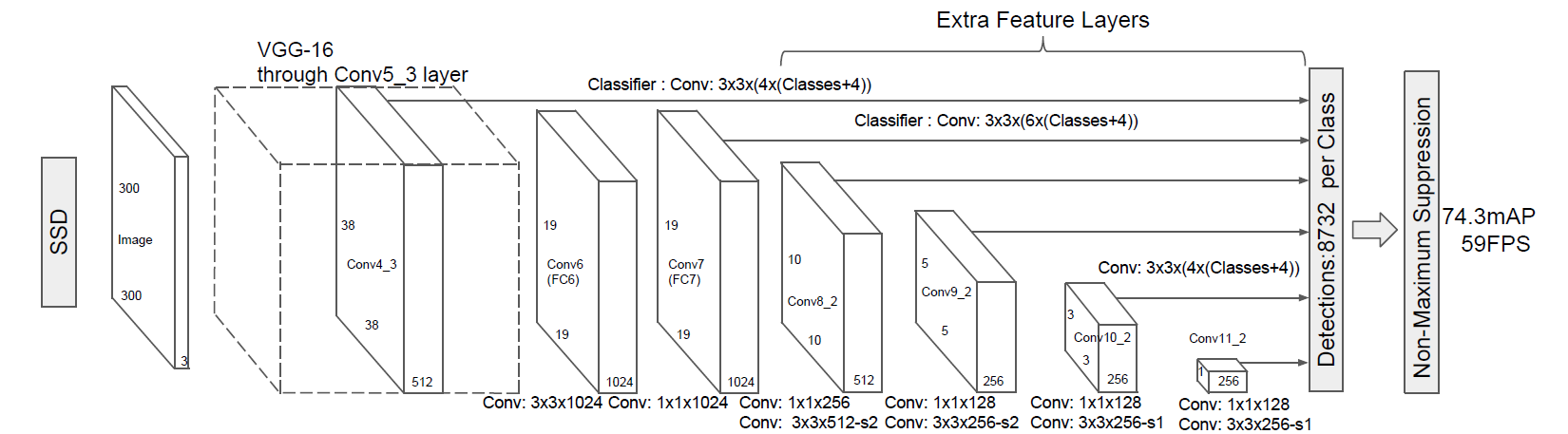
3.1 SSD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
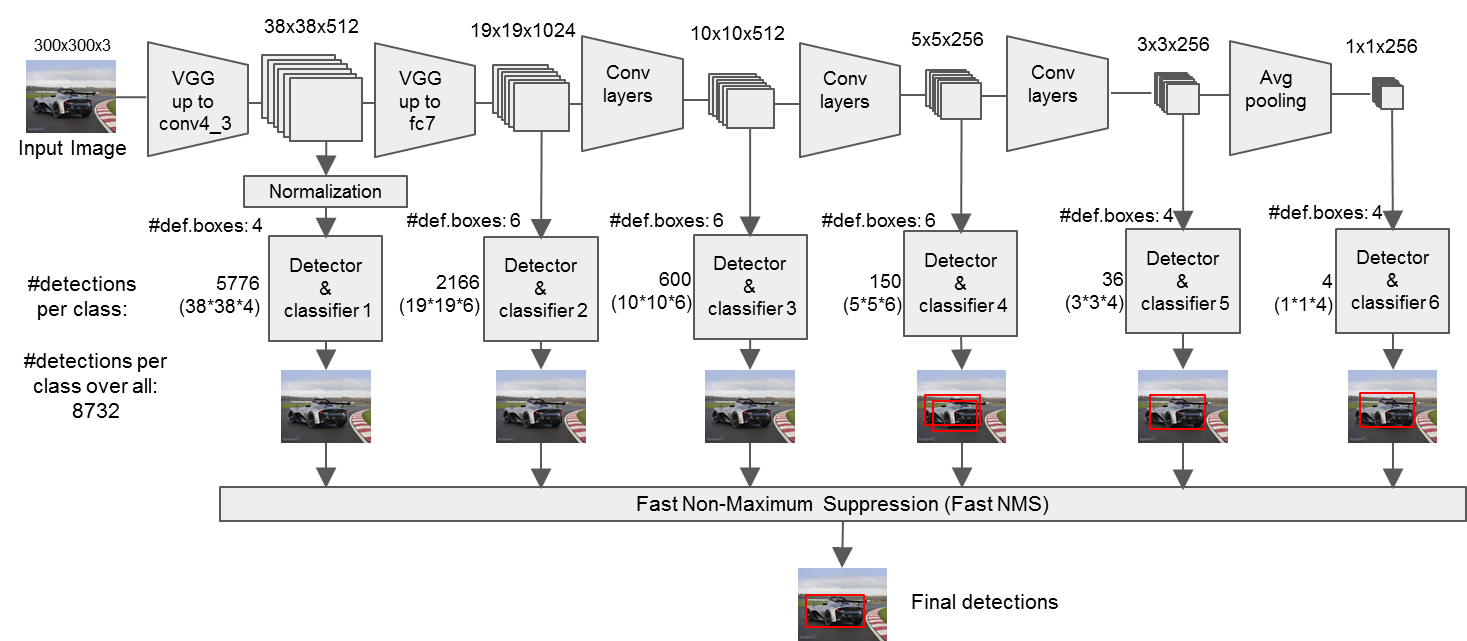
3.1.1 基础网络. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.2 先验框11
3.1.3 损失函数11
3.2 YOLO12
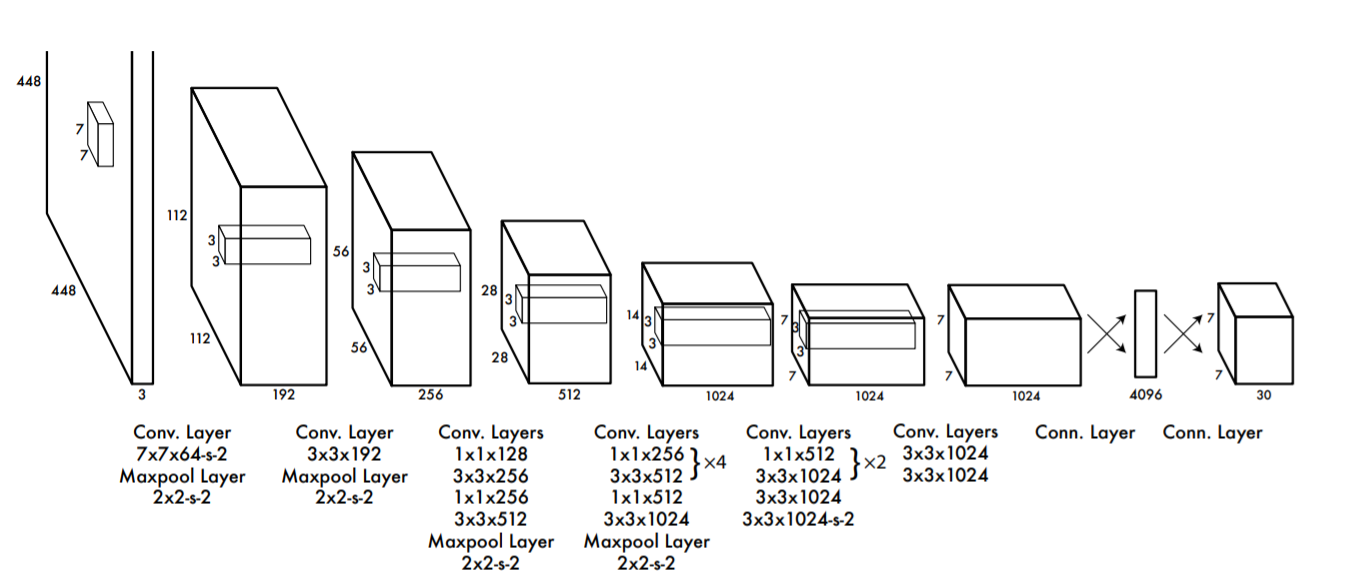
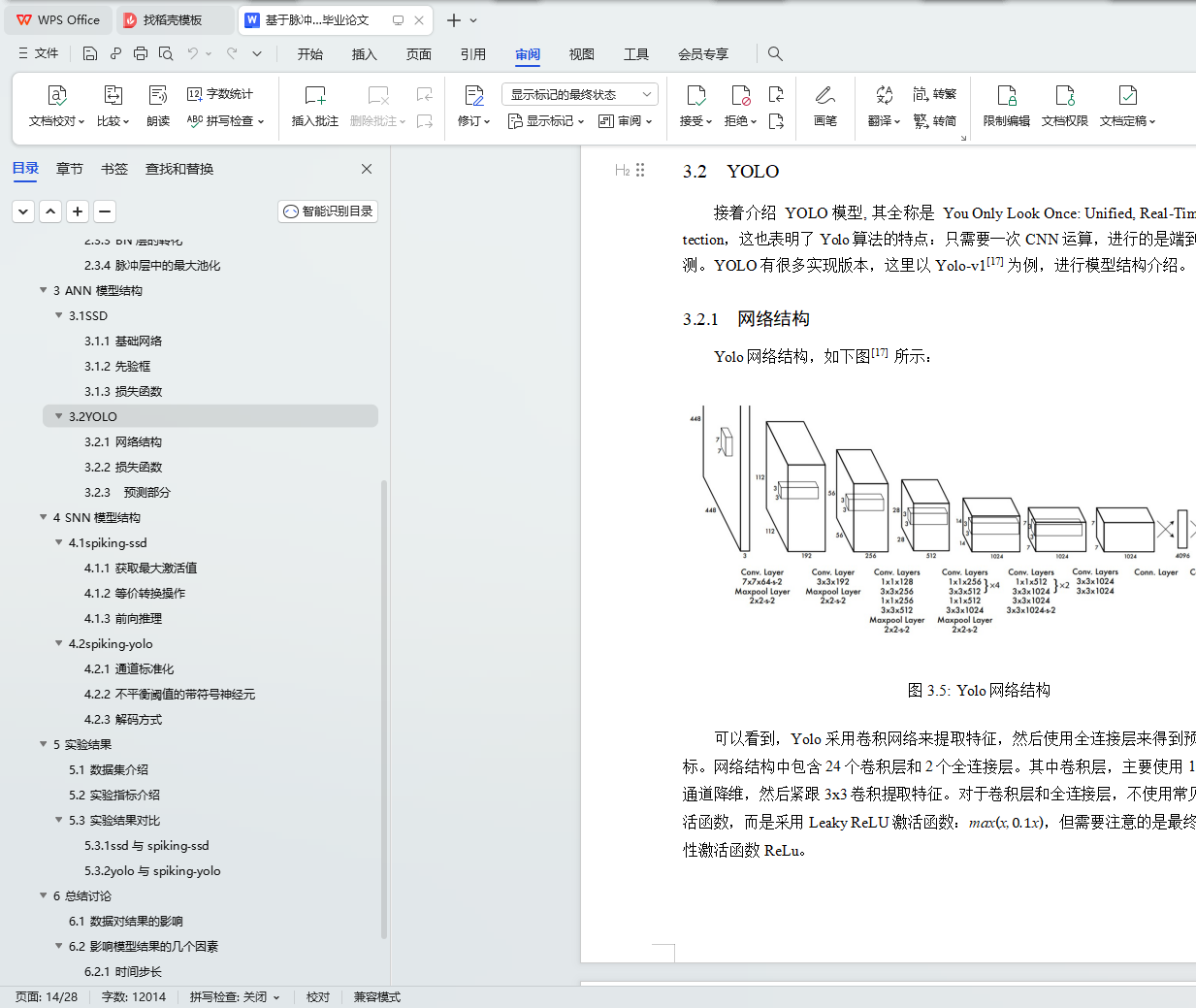
3.2.1 网络结构12
3.2.2 损失函数13
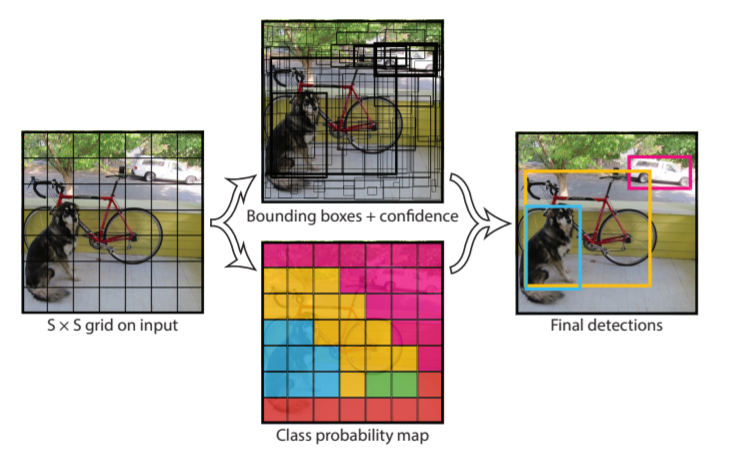
3.2.3 预测部分13
4 SNN 模型结构15
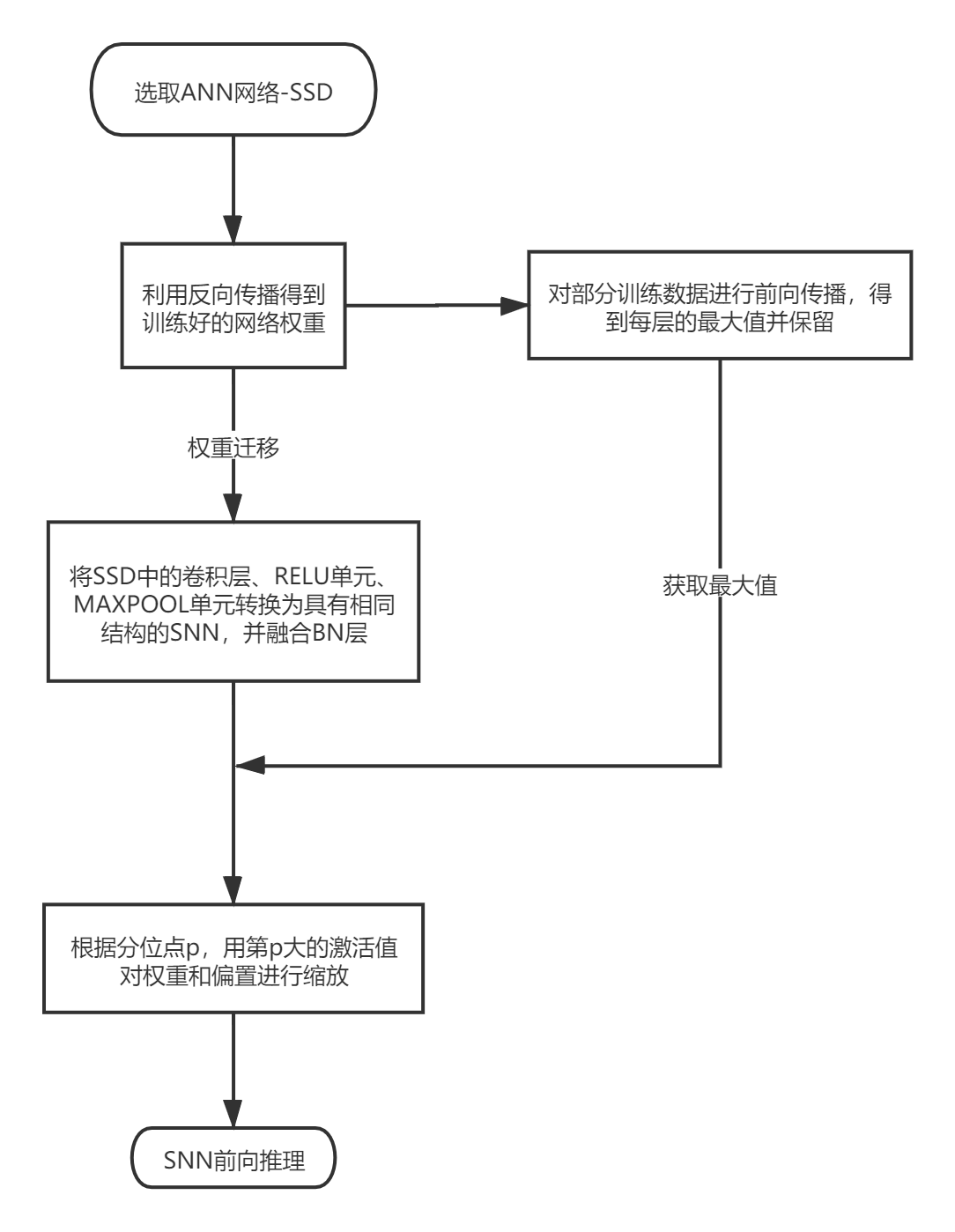
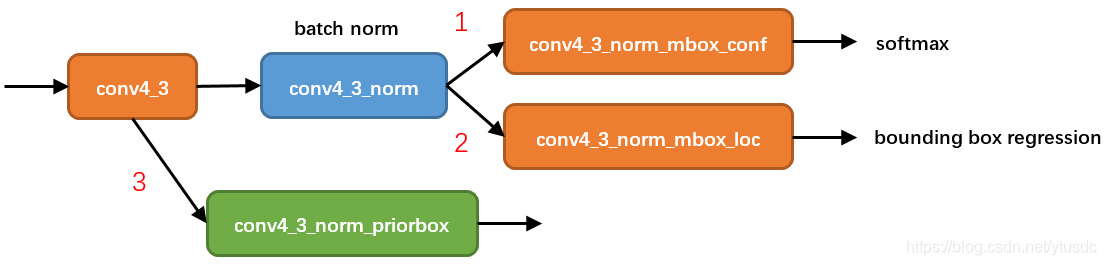
4.1spikingssd15
4.1.1 获取最大激活值16
4.1.2 等价转换操作17
4.1.3 前向推理17
4.2spikingyolo17
4.2.1 通道标准化17
4.2.2 不平衡阈值的带符号神经元18
4.2.3 解码方式19
5 实验结果21
5.1 数据集介绍21
5.2 实验指标介绍21
5.3 实验结果对比21
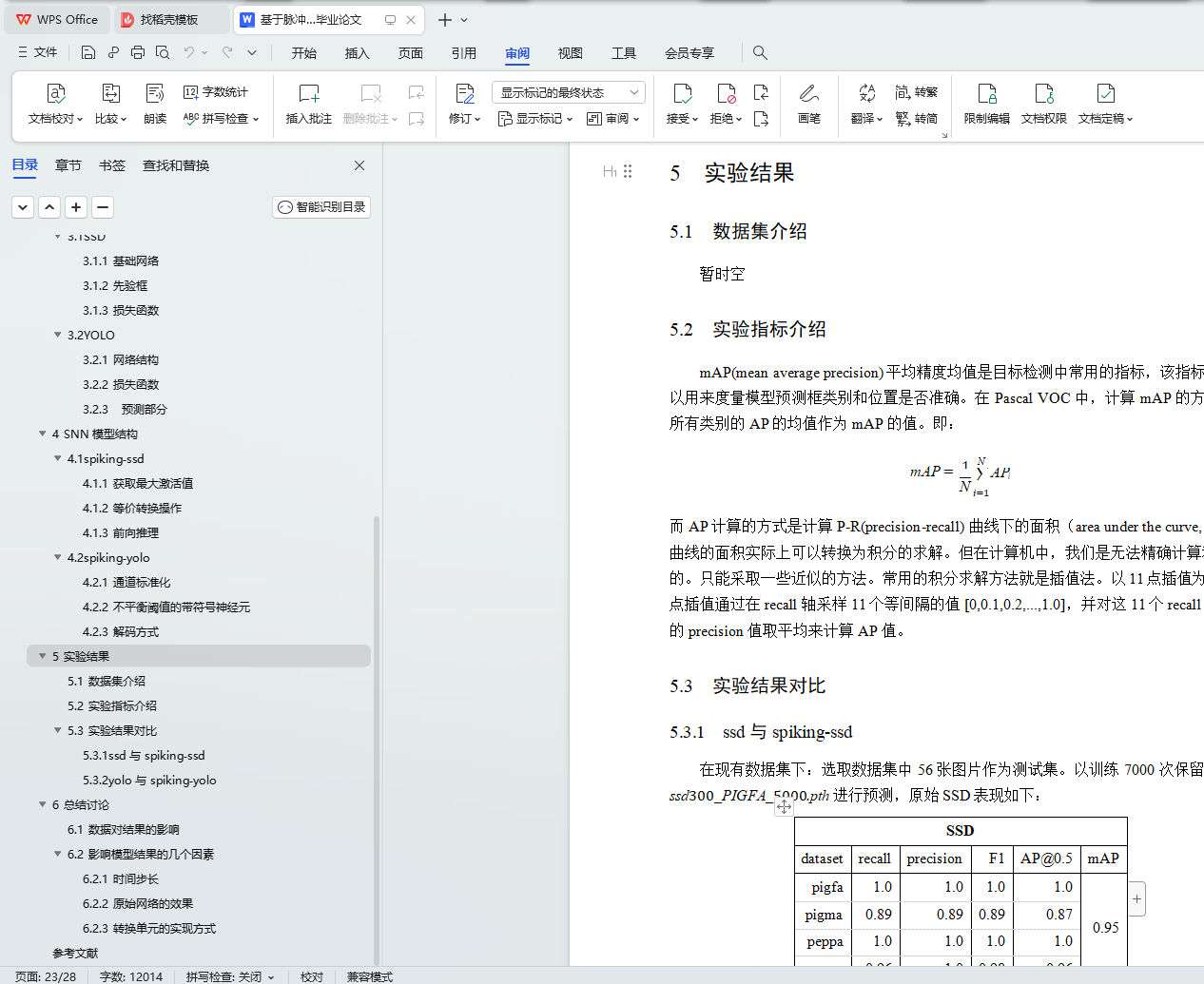
5.3.1ssd 与 spikingssd21
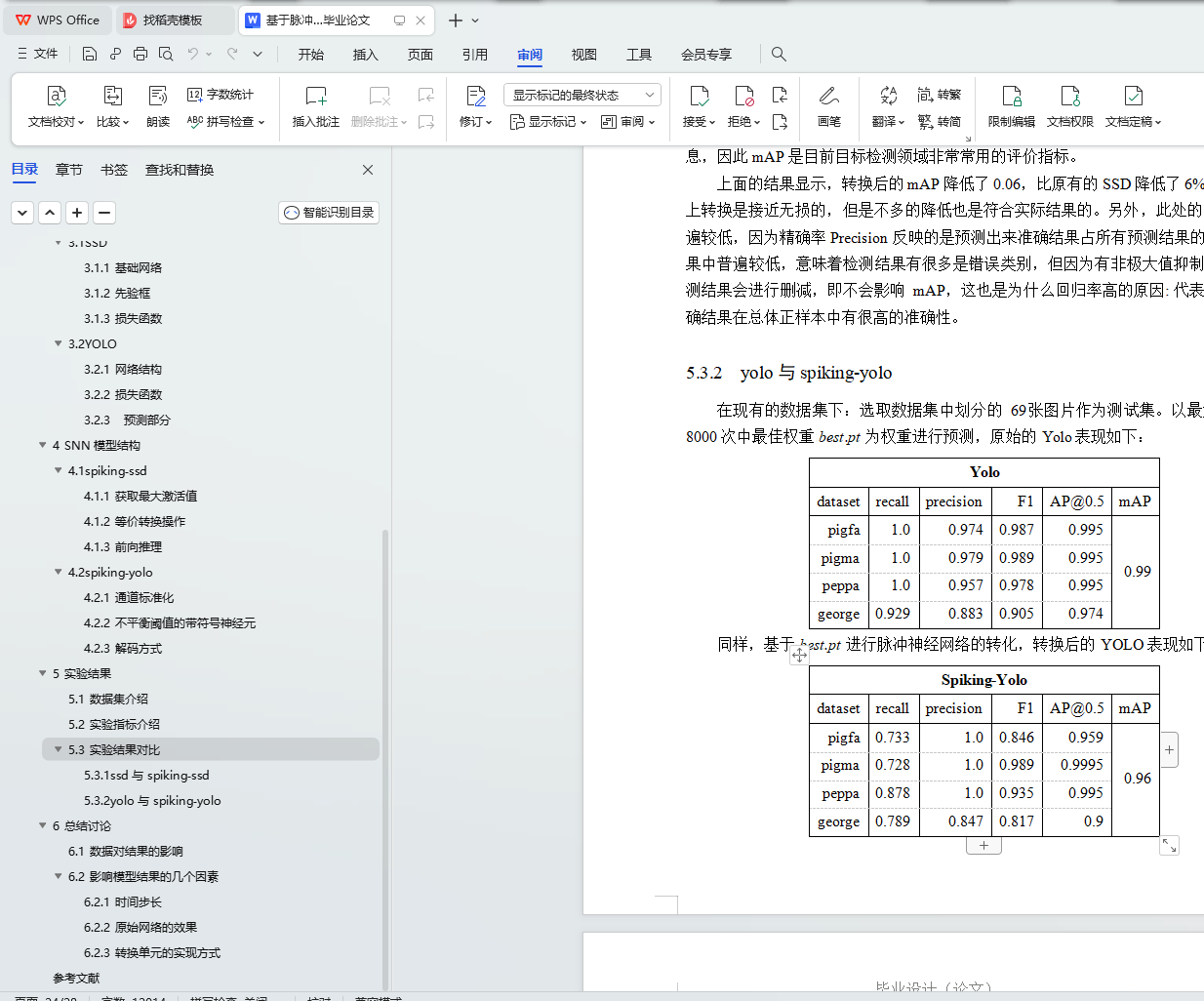
5.3.2yolo 与 spikingyolo22
6 总结讨论24
6.1 数据对结果的影响24
6.2 影响模型结果的几个因素24
6.2.1 时间步长24
6.2.2 原始网络的效果24
6.2.3 转换单元的实现方式24
参考文献26
目标检测是一种应用特定计算机算法在图像中找到所需目标的技术。近年来,随着 计算机硬件的不断发展,目标检测的各种算法也迎来了巨大的突破,越来越多地应用于 交通检测、智能支付、医疗影像等各个方面。在计算机视觉中,目标检测是要比图像分 类更复杂的一个问题,它不仅要清楚目标的类型,还需做到目标的定位。所以,物体检 测的难度更大,挑战性更强,相应的深度学习模型也会更加复杂。
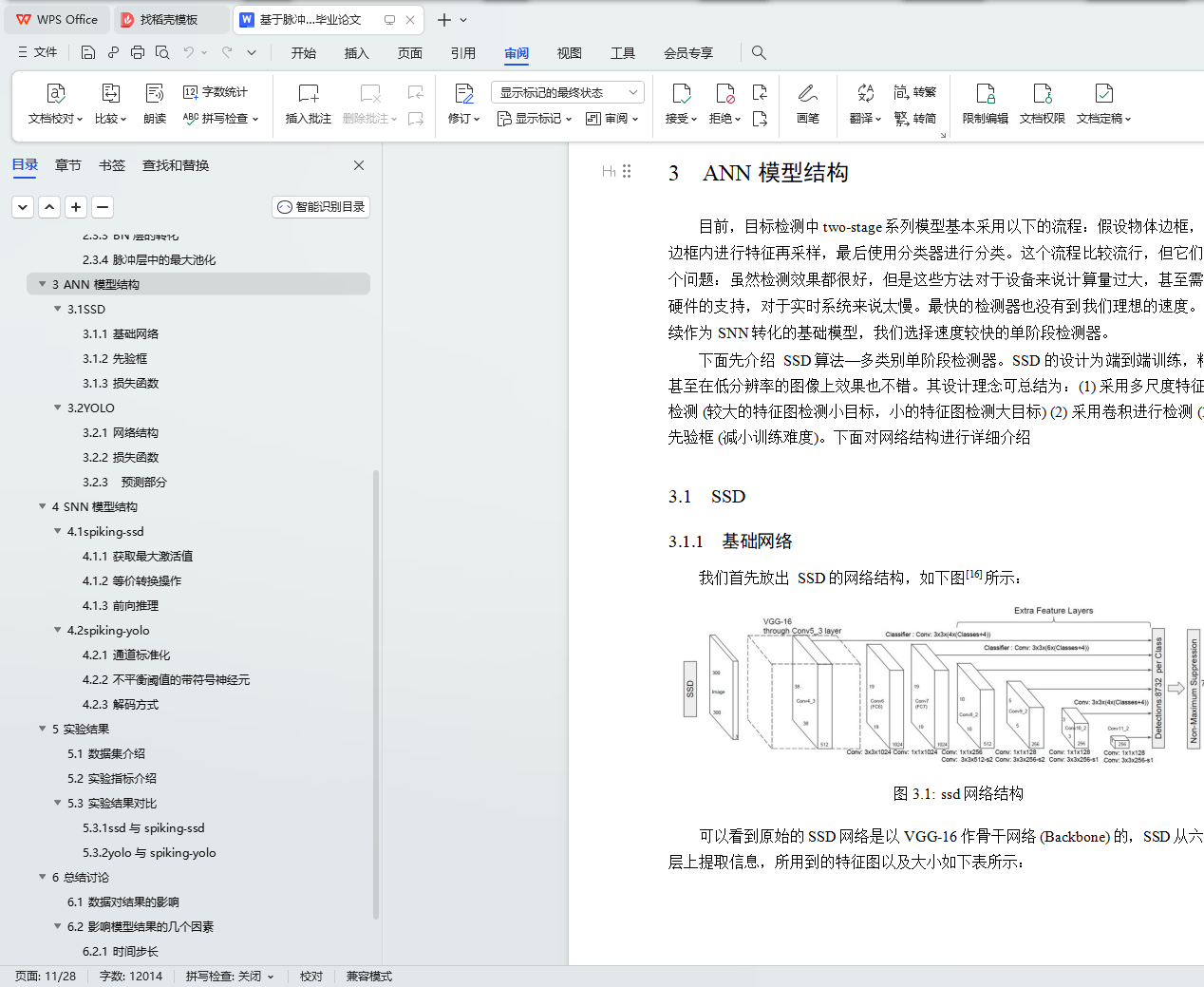
目标检测有许多算法,卷积神经网络(Convolutional Neural Networks, CNN)是其代 表算法之一。它是一个前馈神经网络,具有卷积计算和深度结构。目前,基于卷积神经网 络的目标检测算法大致可分为两种模式,即 twostage 模式和 onestage 模式,twostage 模 式的检测过程分为两个步骤:首先由算法生成若干个候选框,再通过 CNN 对候选框进行 分类;onestage 模式则是端到端的学习,直接对对目标的置信概率和位置进行回归,相 对来说精度有所损失,但速度较 twostage 模式的算法更快。[1]

毕业66资料站 biye66.com ©2015-2026 版权所有 | 微信:15573586651 QQ:3903700237
本站毕业设计和毕业论文资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途.如有侵犯您的版权有损您的利益,请联系我们会立即改正或删除有关内容!